

INLEARC
Project budget and timeline
- Total project budget: 309 820 €
- SeAMK share of the total budget: 82 940 €
- Schedule: 1.9.2019 – 31.8.2022
Partners
- IMECC OÜ, Tallinn, Estonia (project coordinator)
- Tallinn Industrial Education Centre, Tallinn, Estonia
- Seinäjoki University of Applied Sciences, School of Technology, Seinäjoki, Finland
- Riga Technical College, Riga, Latvia
Main objectives
The objective of the INLEARC project is to develop the methodology and corresponding teaching materials (supported with the tools of artificial intelligence) in the field of robotics/mechatronics for these use in an innovative e-learning environment (digital platform). Through visualization and virtualization, the digital learning materials are based on robotics work-cell of actual work-places.
The aim is to change teaching process more interactive, interesting and attractive, to make difficult technical subjects more easily understandable and available, using also game-based principles. Therefore, VET students will obtain competences that the industry needs and become more competitive in labour market. Companies have workforce in the future that has competences they need. As labour force is one of the most important resources of the company, then the assumptions for better competitiveness of the companies would be created. Also, through improved teaching process increases competitiveness of the educational institutions and their revenues.
Outputs of the INLEARC project
Intellectual outputs of the project are:
- Output 1: Methodology for digital competences in the field of robotics/mechatronics
- Output 2: Artificial intelligence (AI) enabled smart e-learning materials for future specialists of robot-based work-places.
- Output 3: Integration of Digital Intelligent Education in Robotics/Mechatronics into Digital Learning Platform (DLP)
Events and news
SeAMK-led activity ”Strategy, methods, and principles for the digital teaching process development” from the project’s output 1, started with a collaborative ideation work to achieve a joint view for the development process framework. Collaboration was arranged using the Miro platform which is a web-based intuitive visual tool for real-time collaboration. During three workshops, the project team created a comprehensive scheme for the digital teaching development process based on their experiences and knowledge. Next, the project team will transfer all ideas into a report which will conclude the activity.
The 1st trans-national INLEARC-project meeting in Tallinn, Estonia arranged by IMECC Oü on September 26-27, 2019.
The 2nd trans-national INLEARC-project meeting to be held in Seinäjoki University of Applied Sciences in Seinäjoki, Finland on February 19-20, 2020.
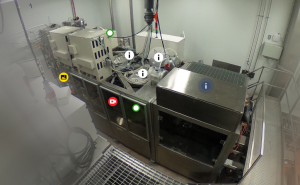
SeAMK’s project team visited a local and globally operating company Atria PLC which is one of the leading meat and food companies in Northern Europe. The goal of the visit was to start the project’s activities regarding robot cell descriptions. Atria’s representatives kindly let us analyse and describe one of their robotized packing lines and activities around it. SeAMK’s project team chose to utilize 360 camera technology to capture robot cell functionality from various perspectives. The 360 images and videos were later put together in a ThingLink platform which is an environment for presenting 360 images and videos and for creating interactive functionality over the material. Overall, the project team managed to analyse the robot cell functionality and employee roles regarding the packing line very well. The company representatives were also surprised how well the 360-imaging technology was able to capture so much information and they saw some potential use cases for the technology in their operations.
Based on the results of the project’s output 1, project partners started to develop modular-based e-learning materials in the field of robotics/mechatronics on the output 2 activity. The Estonian project team has been focusing on robot bending with a comprehensive set of use cases. The Latvian project team started with a robotic safety-related use case. The Finnish project team has been focusing to develop use cases for collaborative robot assembly and welding robot offline programming. Although there are still more to come, at this stage the project has managed to develop a cross-cutting set of e-learning material in the field of robotics and mechatronics.
Project materials
INLEARC-poster Click here
Further information


